Lasermice

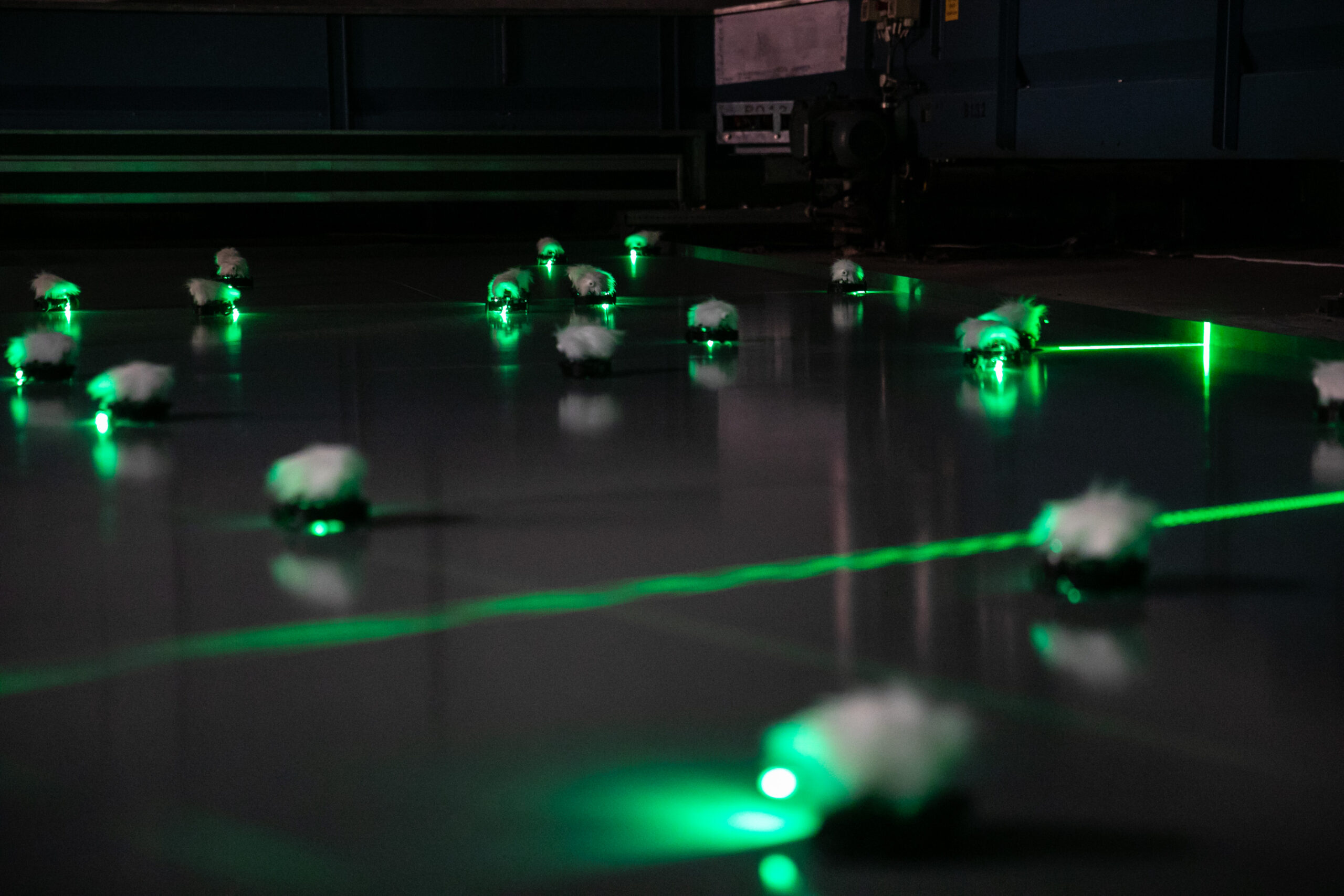


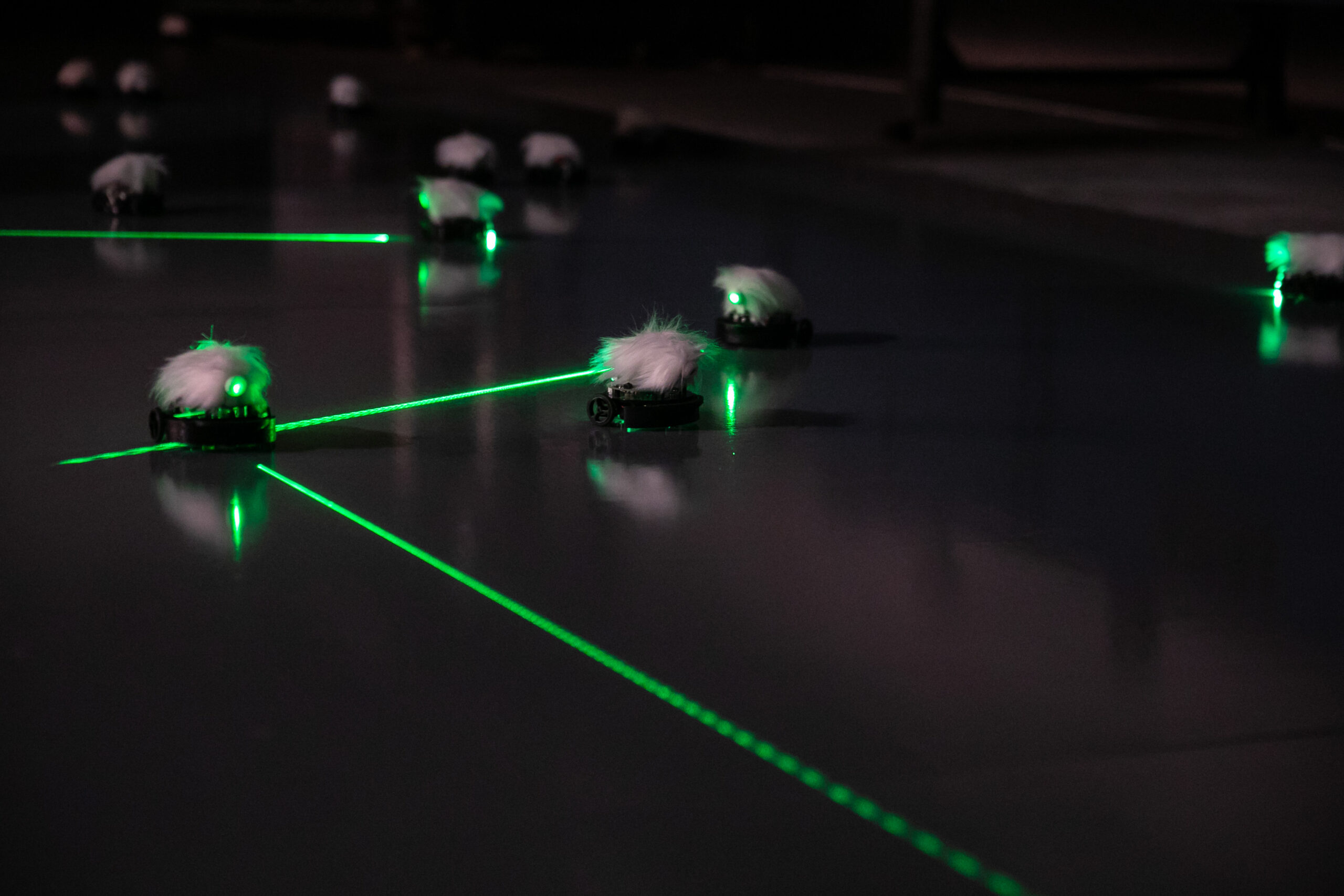



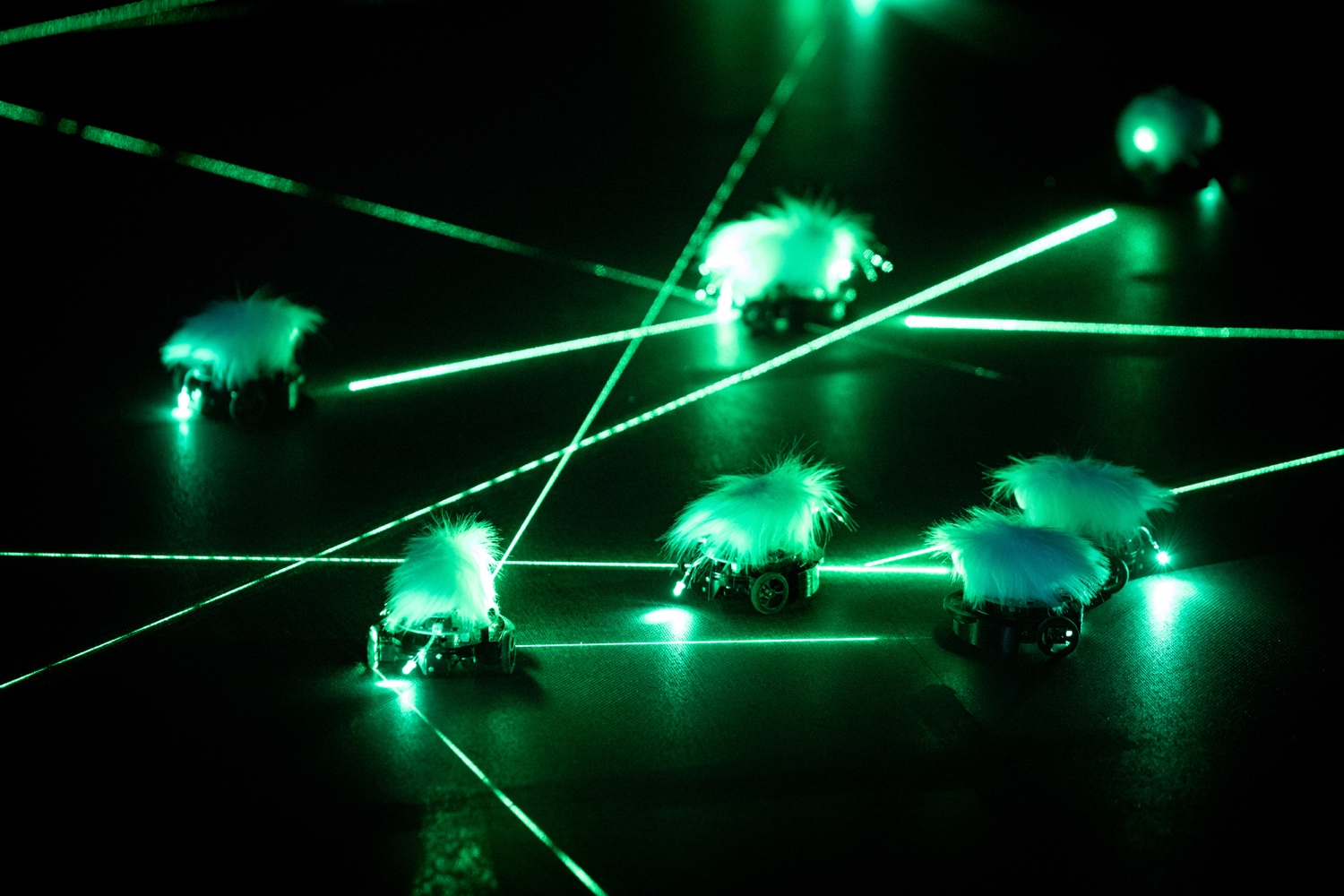
“Lasermice” is a swarm robotic installation that consists of 60 small robots, which inspired by synchronous behavior from insects like fireflies. Normally network of swarm is invisible, But in this case those robots creates visible network via laser light – photodetector communication. As a result, they generates rythme that continuously changing. The generated rhythm is made audible by solenoid which strikes floor. Combination of visible network and audible rhythm are deployed spatially.
Most of the time, this kind of multiple device system is only connected to single control system. Contrary the system of this project, each device is communicating each other. Thus, the synchronization is not a thing that controlled, but emerged. This kind of system is called swarm intelligence which was found and researched by observation on animals which flocks such as birds, fish, bees and ants. Humans are listening to chorus of frogs or bell cricket, watching flocking thousands of birds. because we feel it’ s beautiful. I was questioning “Is that possible to make such a thing, something worth to see like natural phenomena, but artificial.”
This project is about making artificial natural phenomena. Moreover not just mimicking algorithm, make up my own one, to pursue expression.
「Lasermice」はホタルなどの群生する生物に見られる同期現象に着想を得た、60台の自走する小型ロボットを用いたインスタレーションである。通常、群の動態間ネットワークのシステムは不可視だが、動き回る無数のロボットは、互いの発するレーザー光によって視覚化されたネットワークを形成し、呼応することで常に変化するリズムを生成する。光と同時に発する打撃音と相まって、その生成されたリズムは視聴覚的かつ空間的に展開される。
本作は、従来の人工的なシステムに多く見られる、ひとつの指揮系統から個々の端末が制御される方法とは違い、それぞれの個体が独立して互いにコミュニケーションすることでシステムを構成し、同期現象を発生させる。こういったシステムは群知能と呼ばれ、多くの科学者によって鳥や魚、ミツバチといった群になって行動する動物を観察することで発見・研究されてきた。
人は蛙の合唱や鈴虫の鳴く声に耳を傾けたり、群れて舞う鳥の大群に目を奪われたりするが、私達はそのような自然の営みを美しいと感じ鑑賞する。鑑賞に値する自然のようなものを人工的に作れないだろうか。このプロジェクトは自然現象のアルゴリズムに着想を得て、且つ模倣ではないオリジナルのアルゴリズムを作ることによって新たな表現を模索する試みである。
Exhibitions
2021 Canal Connect (Teatros del Canal, Madrid)
2019 Nemo Biennale (104, Paris)
2019 Now Japan (Vilnius, Lithuenia)
2019 Festival Ars Electronica (Postcity, Linz)
2019 22nd Japan Media Art Festival Excellence Award
2019 Digital Art Lab (Station Berlin, Berlin)
2018 Speculum Artium (Delavski Dom, Trvobjie)
Selected Works

Lasermice dyadinstallation
Kazokutchia-life NFT robot

Lasermice ensemblesperformance

Lasermice workshopworkshop
LasermiceInstallation

SENSELESS DRAWING BOTInstallation

Yarn Recorderexperimental device

Avatarsinstallation

Asemic LanguagesInstallation

SEMI-SENSELESS DRAWING MODULESInstallation
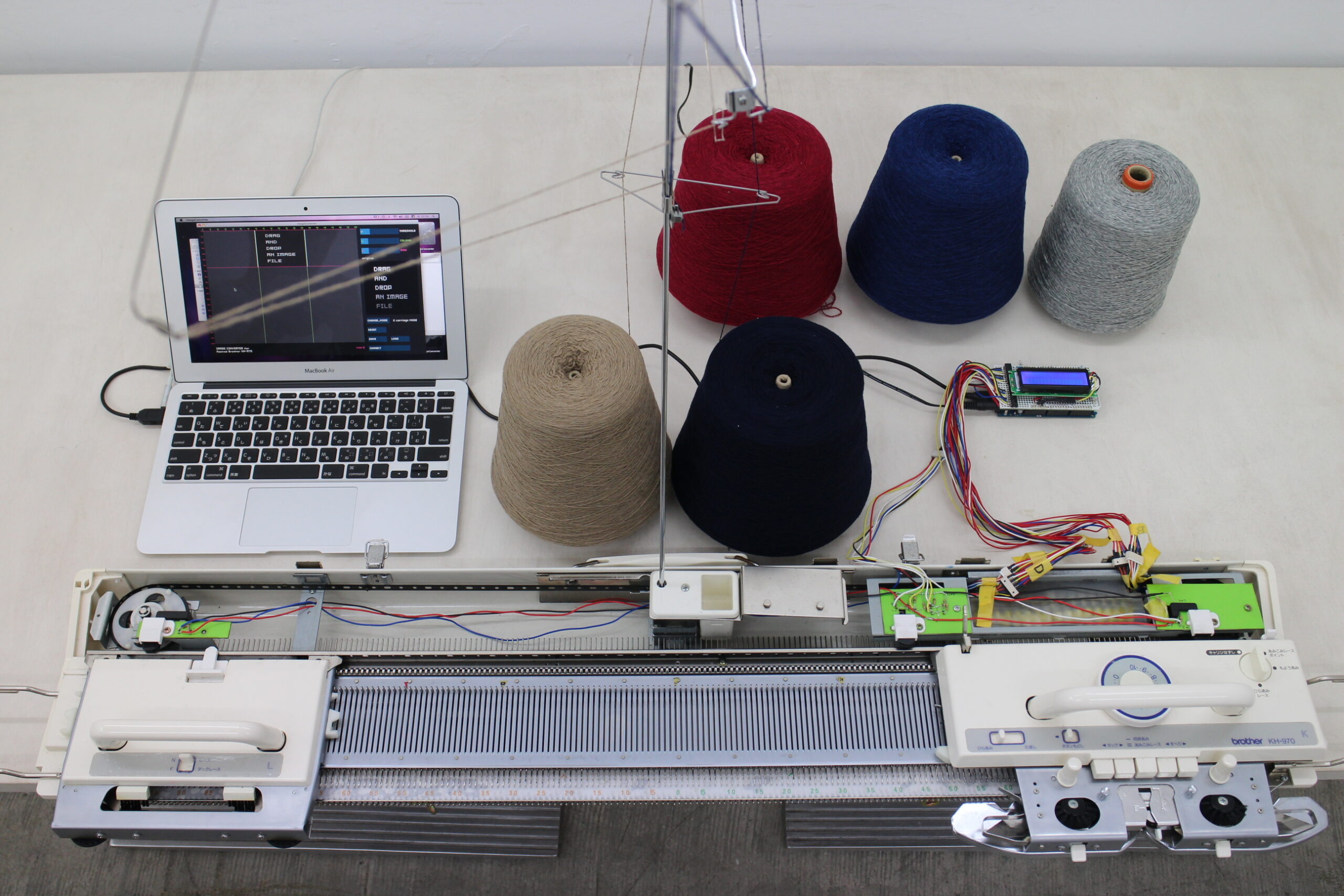
Glitch Knithacking / knitting
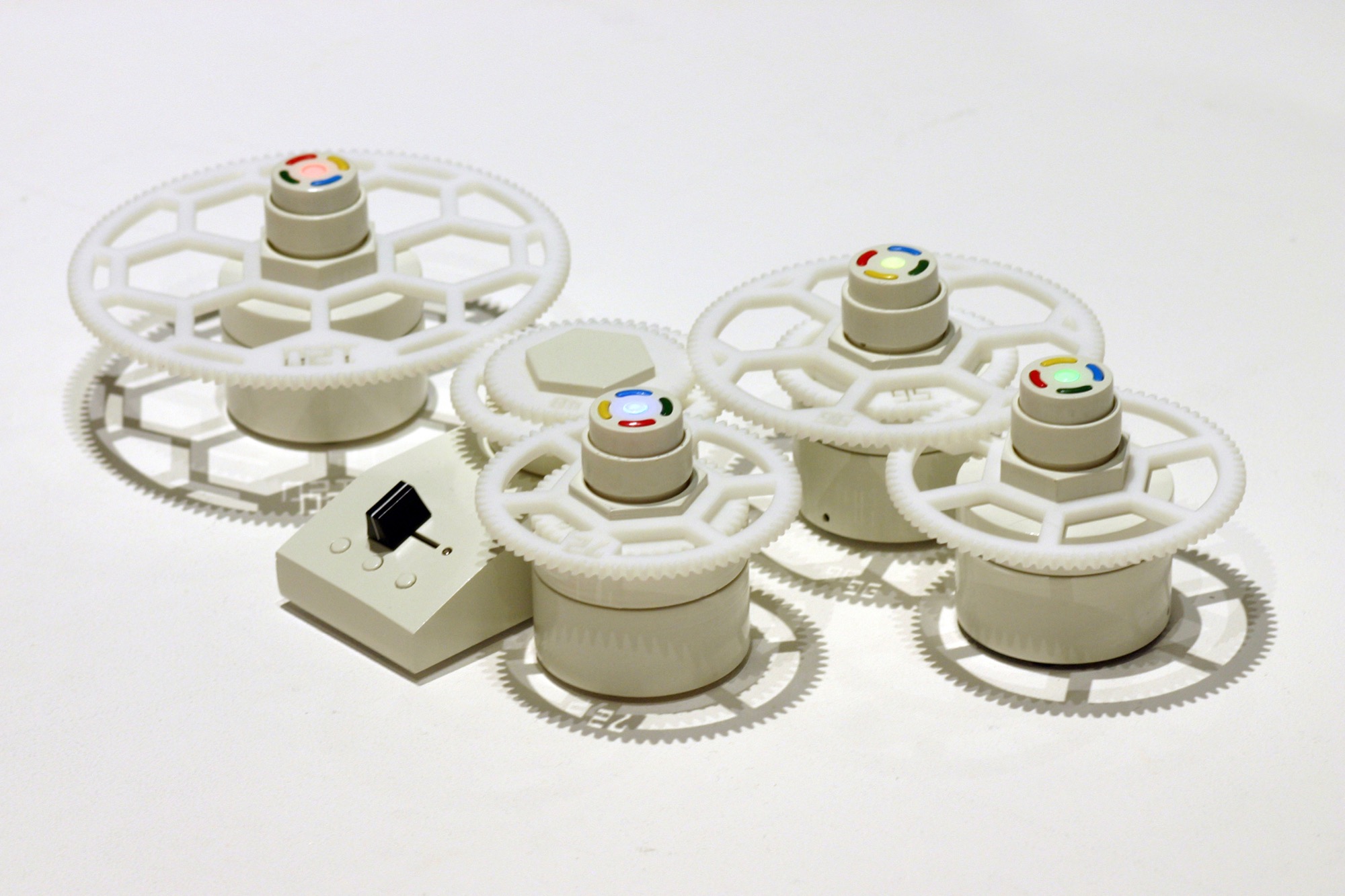
Jamming Geargadget

Objets of soundinstallation

Technophone seriesgadget
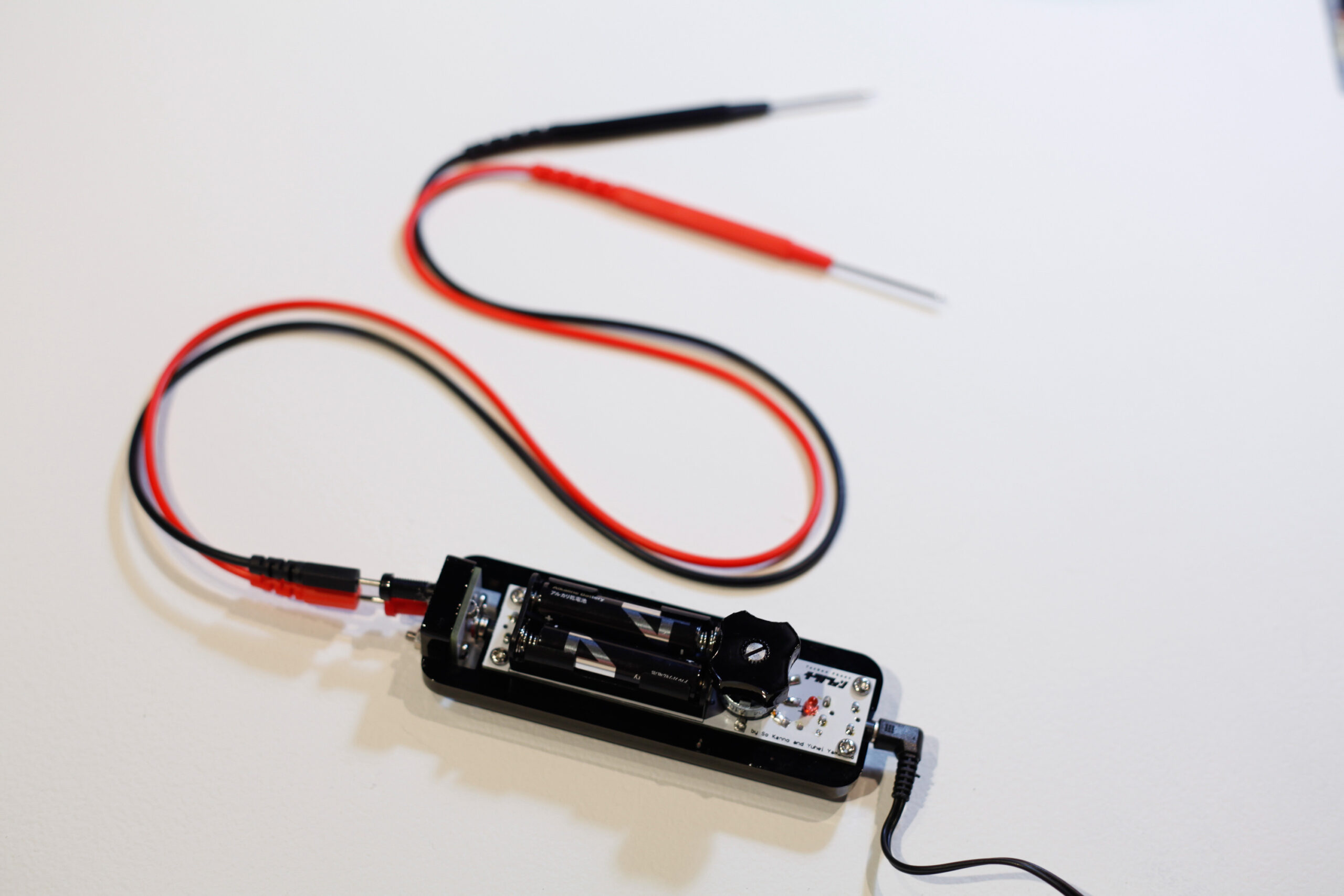
Technophone Kitgadget / workshop

Computed Copyclothing

Captured DesireSculpture
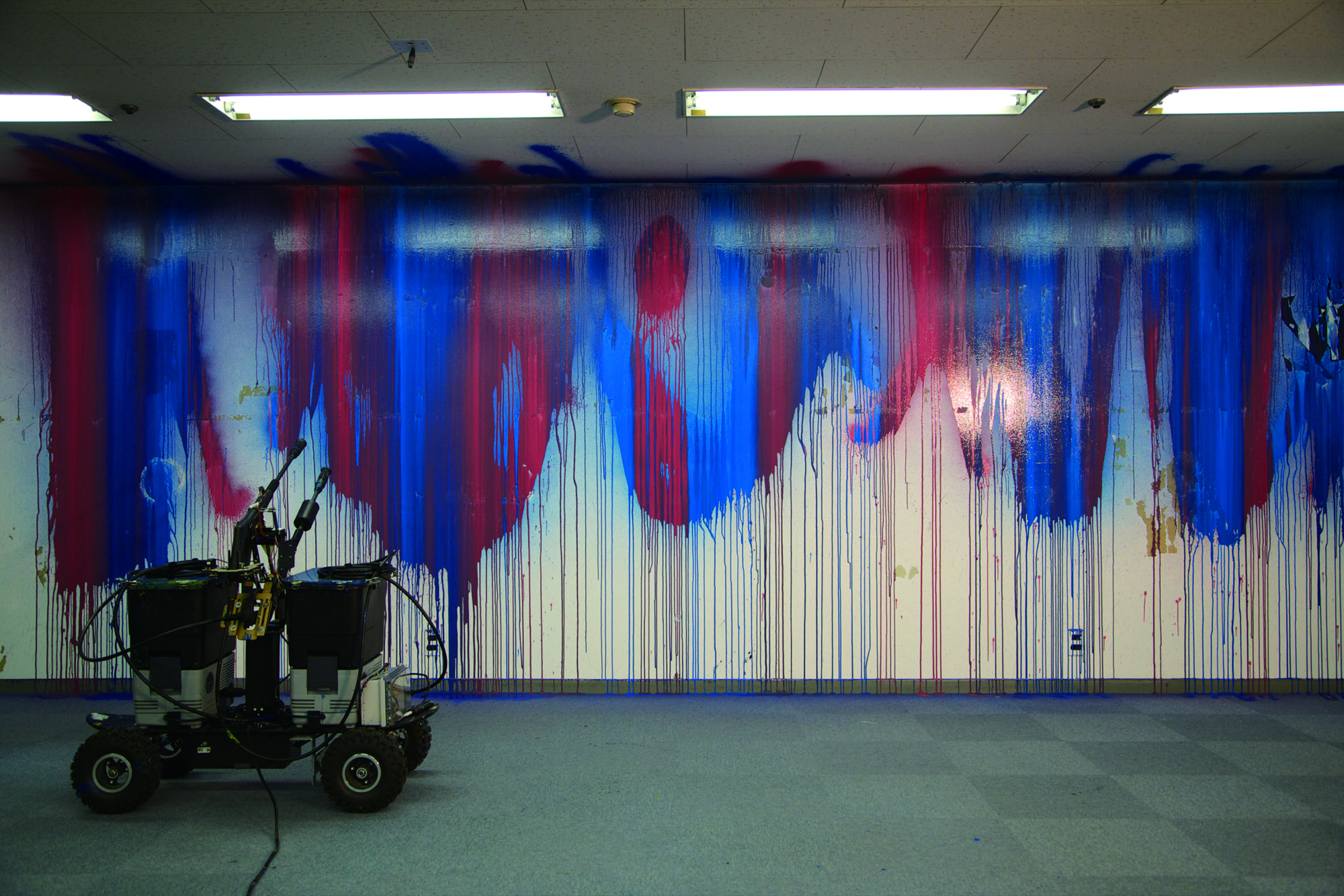
SENSELESS DRAWING BOT 2Installation

turntable sequencerInstallation

slit movie sequencerInstallation

bells in the waterInstallation